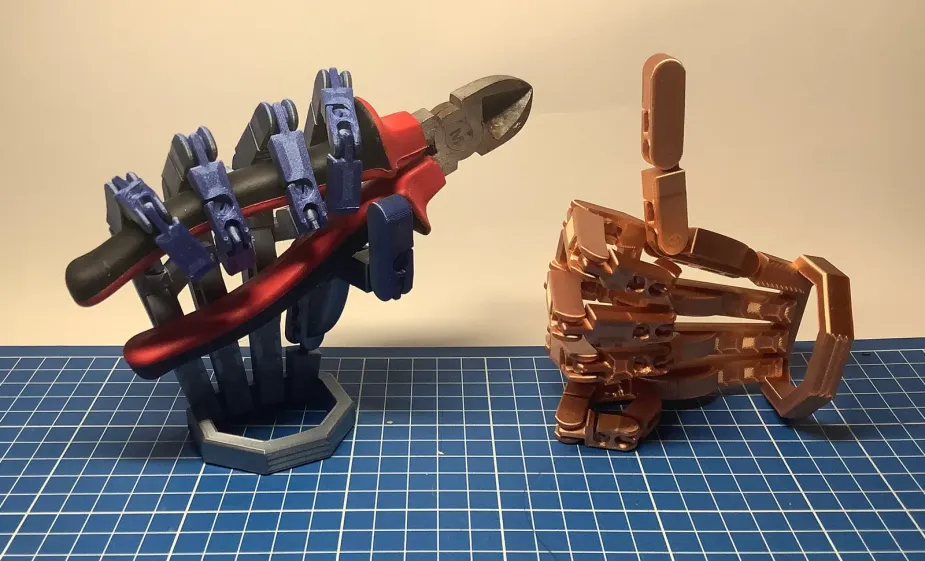
3D-модель роботизированной руки, предназначенная для печати в сборе и последующей регулировки, представляет собой цифровую копию механической руки, оптимизированную для 3D-печати. Такая модель состоит из нескольких взаимосвязанных частей, которые печатаются одновременно и не требуют дополнительной сборки. После печати отдельные элементы можно регулировать, чтобы настроить положение пальцев и захват.
Ключевые особенности модели:
- Печать в сборе (print-in-place): Все детали модели печатаются одновременно, соединенные друг с другом тонкими перемычками. После печати эти перемычки удаляются, а детали остаются соединенными.
- Регулировка (tightenable): Отдельные суставы руки оснащены элементами, которые позволяют регулировать натяжение и, следовательно, положение пальцев. Это может быть достигнуто за счет использования резьбовых соединений, пружин или других механизмов.
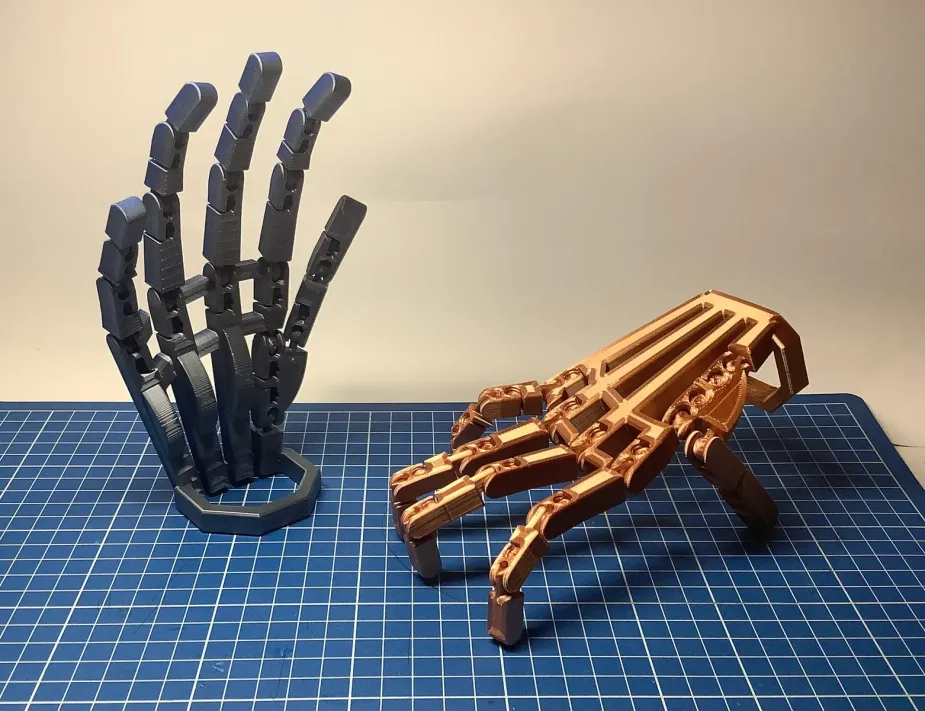
- Детализация: Модель может быть выполнена с высокой степенью детализации, включая имитацию механизмов, проводов и других элементов.
- Функциональность: Несмотря на то, что модель предназначена для печати в сборе, она может выполнять простые захватные движения.
- Материал: Для печати такой модели рекомендуется использовать гибкие материалы, такие как TPU или TPE, чтобы обеспечить подвижность суставов.
Преимущества использования модели:
- Простота сборки: Отсутствие необходимости в дополнительной сборке значительно упрощает процесс создания модели.
- Функциональность: Регулируемые суставы позволяют настроить руку под различные задачи.
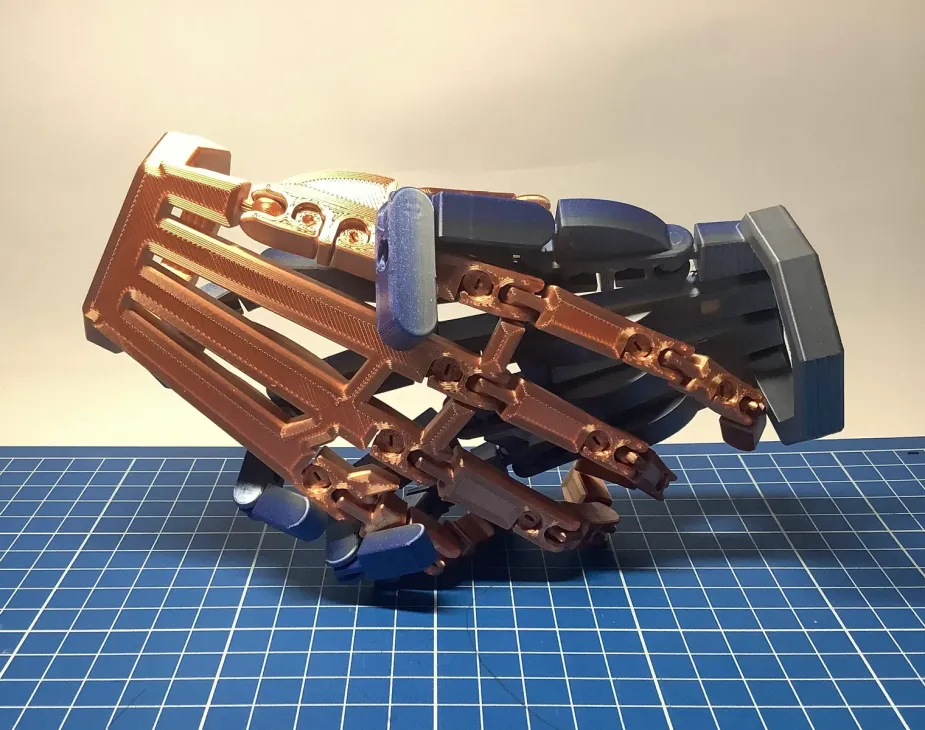
- Декоративность: Модель может стать оригинальным элементом интерьера или коллекционным экспонатом.
- Обучение: Модель может использоваться для обучения принципам робототехники и 3D-печати.
Возможные варианты использования:
- Декор: Роботизированная рука может стать стильным аксессуаром для рабочего стола или элементами декора в стиле киберпанк.
- Обучение: Модель может использоваться в образовательных целях для демонстрации принципов работы механических манипуляторов.
- Прототипирование: Модель может служить основой для создания более сложных робототехнических устройств.
Советы по печати и сборке:
- Выбор материала: Использование гибких материалов, таких как TPU или TPE, позволит обеспечить необходимую подвижность суставов.
- Настройки слайсера: Правильно настройте слайсер для печати гибких материалов, чтобы избежать деформаций и других проблем.
- Удаление опор: После печати аккуратно удалите все опорные структуры, чтобы не повредить модель.
- Регулировка суставов: После удаления опорных структур осторожно отрегулируйте натяжение в суставах для достижения желаемой подвижности.
Заключение:
3D-модель роботизированной руки, предназначенная для печати в сборе и последующей регулировки, представляет собой интересное и функциональное решение для любителей 3D-печати и робототехники. Такая модель позволит вам создать уникальный и функциональный объект, не требующий сложной сборки.
 Дом и офис
Дом и офис Детали
Детали 3д фигурки
3д фигурки Игрушки и игры
Игрушки и игры Полезные вещи
Полезные вещи Инструменты
Инструменты Садоводство
Садоводство Стиль и мода
Стиль и мода