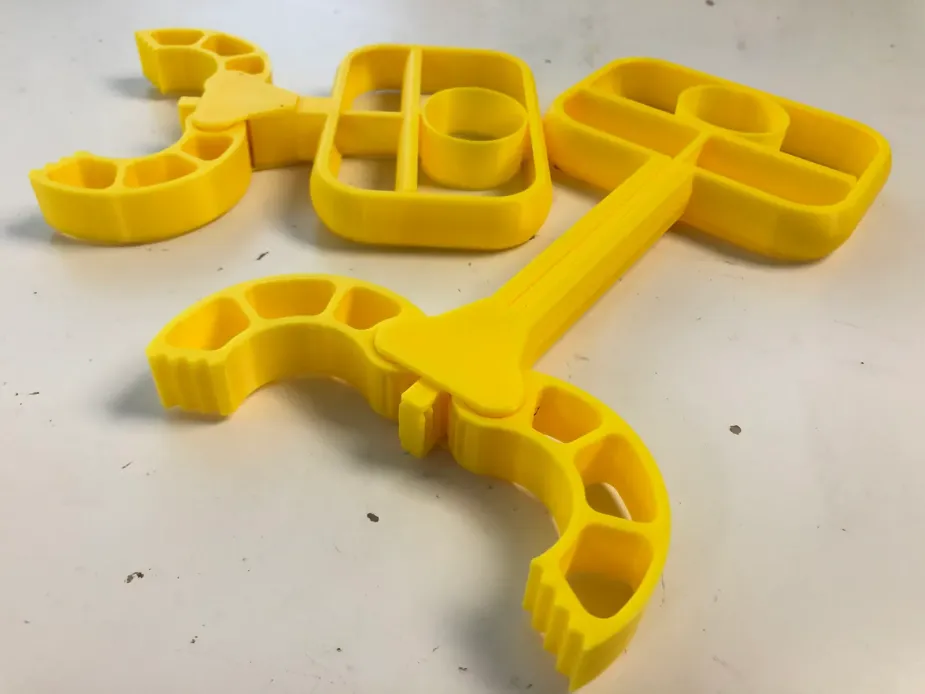
3D модель игрушечной роботизированной руки – это увлекательный проект для любителей робототехники и 3D-печати. Такая модель позволит создать интерактивную игрушку, с помощью которой можно изучать принципы механики и программирования.
Ключевые особенности модели:
- Функциональность: Игрушечная рука может выполнять различные движения, такие как захват, подъем и перемещение предметов.
- Модульность: Модель обычно состоит из нескольких сервоприводов, соединенных между собой рычагами и шарнирами. Это позволяет создавать различные конфигурации руки и изменять ее функциональность.
- Программируемость: Многие модели могут быть запрограммированы для выполнения определенных действий или последовательности движений.
- Оптимизация для 3D-печати: Модель должна быть подготовлена для 3D-печати, то есть иметь правильную ориентацию, достаточную толщину стенок и отсутствовать тонкие детали, которые могут сломаться при печати.
Материалы и инструменты:
- 3D-принтер: Для печати деталей модели.
- Филламент: PLA, ABS или другой прочный материал, подходящий для вашего 3D-принтера.
- Сервоприводы: Для приведения в движение суставов руки.
- Электроника: Микроконтроллер, платы управления, провода и т.д.
- Программное обеспечение: Для программирования микроконтроллера.
- Инструменты: Паяльник, отвертки, клещи и т.д.
Процесс создания:
- Выбор модели: Вы можете найти готовую 3D-модель игрушечной руки на специализированных платформах или создать свою собственную модель с помощью программ для 3D-моделирования.
- Подготовка модели к печати: Проверьте модель на наличие ошибок, оптимизируйте ее для печати и нарежьте на слои с помощью программного обеспечения для 3D-печати.
- Печать деталей: Распечатайте все детали модели на 3D-принтере.
- Сборка: Соберите механическую часть руки, соединив детали между собой и установив сервоприводы.
- Электроника: Подключите сервоприводы к микроконтроллеру и напишите программу управления.
- Программирование: Загрузите программу в микроконтроллер и настройте его работу.
Советы:
- Подберите подходящий материал: Для изготовления деталей руки лучше использовать прочный и легкий материал, такой как PLA или ABS.
- Используйте качественные сервоприводы: От качества сервоприводов зависит точность и плавность движений руки.
- Продумайте систему управления: Выберите удобный способ управления рукой, например, с помощью пульта дистанционного управления или компьютерной программы.
- Экспериментируйте с дизайном: Не бойтесь экспериментировать с дизайном руки, добавляя свои элементы и украшения.
Расширенные возможности:
- Дополнительные датчики: Добавьте в руку датчики для определения расстояния, силы захвата и других параметров.
- Искусственный интеллект: Используйте алгоритмы машинного обучения для обучения руки выполнению различных задач.
- Интерфейс управления: Создайте интуитивно понятный интерфейс для управления рукой.
3D-печатная игрушечная роботизированная рука – это отличный проект для тех, кто хочет научиться создавать роботов и изучать принципы механики и программирования. Такая рука может стать основой для создания более сложных роботов и автоматизированных систем.
 Дом и офис
Дом и офис Детали
Детали 3д фигурки
3д фигурки Игрушки и игры
Игрушки и игры Полезные вещи
Полезные вещи Инструменты
Инструменты Садоводство
Садоводство Стиль и мода
Стиль и мода