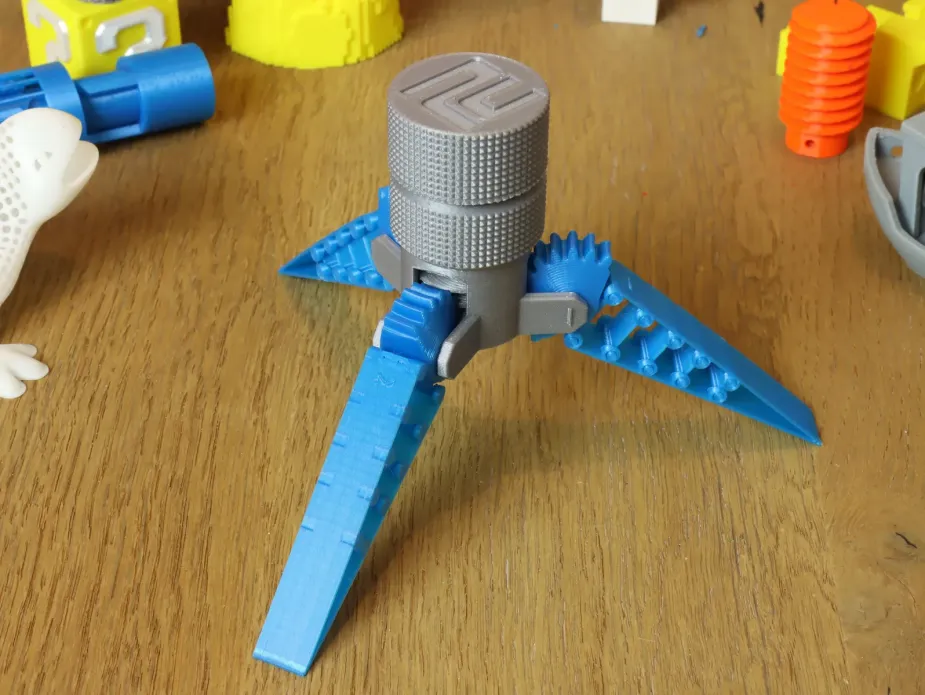
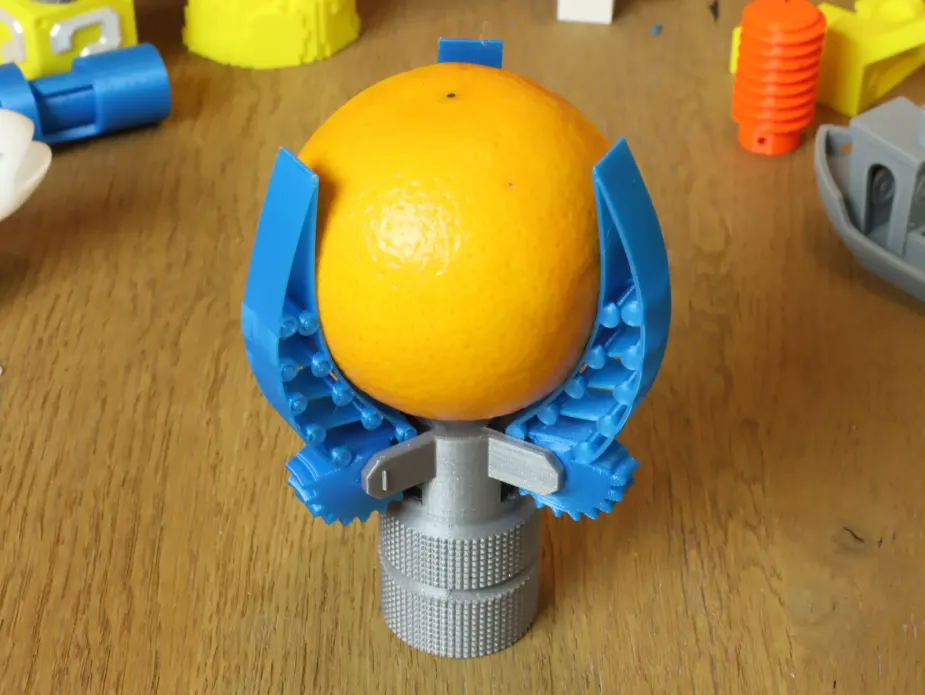
3D-модель гибкого захвата , предназначенная для создания механического устройства, способного схватывать и удерживать предметы различной формы и размера. Благодаря своей гибкости, такой захват может адаптироваться к нестандартным объектам, что делает его универсальным инструментом.
Ключевые особенности модели:
- Гибкость: Захват состоит из гибких элементов, которые позволяют ему обхватывать предметы различной формы.
- Простота конструкции: Обычно состоит из нескольких основных деталей, которые легко собрать.
- Настраиваемость: Многие модели позволяют настраивать силу захвата и размер раскрытия захватов.
- Многофункциональность: Может использоваться для различных задач, от захвата мелких предметов до манипулирования более крупными объектами.
- Компактность: Зачастую имеет небольшие размеры, что позволяет использовать его в ограниченном пространстве.
Конструкция модели:
- Основание: Базовая часть захвата, на которой крепятся все остальные элементы.
- Захваты: Гибкие элементы, которые сжимаются и разжимаются для захвата предметов.
- Механизм привода: Может быть механическим (например, с использованием рычагов или винтов) или электрическим (с использованием сервоприводов).
- Крепление: Элементы, позволяющие закрепить захват на роботе или другом устройстве.
Материалы и настройки печати:
- Материалы: Для печати захватов обычно используются гибкие материалы, такие как TPU (термопластичный полиуретан) или TPE (термопластичный эластомер). Эти материалы обеспечивают необходимую гибкость и прочность.
- Настройки печати:
- Высота слоя: Чем меньше высота слоя, тем более детализированной будет модель.
- Заполнение: Оптимальное значение заполнения зависит от выбранного материала и нагрузок, которые будет испытывать деталь.
- Опоры: Будут необходимы опоры для выступающих элементов модели.
- Температура печати: Необходимо соблюдать рекомендованные производителем температуру экструдера и температурную платформу для выбранного гибкого материала.
- Скорость печати: Рекомендуется использовать более низкую скорость печати для повышения качества и предотвращения деформации.
Преимущества 3D-печати:
- Индивидуализация: Возможность создания захвата с уникальными характеристиками и размерами.
- Низкая стоимость: Стоимость материалов и печати значительно ниже, чем изготовление захвата традиционными методами.
- Быстрое прототипирование: Возможность быстро создать и протестировать различные варианты конструкции.
Возможности применения:
- Робототехника: Использование в роботах-манипуляторах для захвата и перемещения различных предметов.
- Промышленность: Автоматизация производственных процессов.
- Медицина: В медицинских устройствах для проведения операций или реабилитации.
- Образование: Для создания учебных моделей и проведения экспериментов.
- Быт: Для автоматизации домашних задач.
Советы по использованию:
- Выбор материала: Тщательно подберите гибкий материал, который будет соответствовать вашим требованиям по прочности и эластичности.
- Настройки слайсера: Экспериментируйте с настройками слайсера для достижения оптимального результата печати.
- Сборка: Соберите захват тщательно, убедившись, что все детали надежно закреплены.
- Калибровка: Если захват используется в робототехнических системах, необходимо провести его калибровку.
Дополнительные возможности:
- Датчики: Можно добавить датчики для измерения силы захвата или положения захватов.
- Пневматика: Для более мощных захватов можно использовать пневматический привод.
- Интеграция с микроконтроллерами: Для создания более сложных систем управления.
3D-печать открывает безграничные возможности для создания гибких захватов, которые могут быть использованы в самых разных областях. Эта технология позволяет быстро и недорого создавать прототипы и конечные продукты, что ускоряет процесс разработки и внедрения инновационных решений.
 Дом и офис
Дом и офис Детали
Детали 3д фигурки
3д фигурки Игрушки и игры
Игрушки и игры Полезные вещи
Полезные вещи Инструменты
Инструменты Садоводство
Садоводство Стиль и мода
Стиль и мода